Graph¶
Representations¶
Edge lists¶
An edge is represented using an array of two vertex numbers or objects contain the vertex numbers. Weights can be added as the third number or another member of the objects.
- Example:
[[0,1], [0,6], [0,8], [1,4], [1,6], [1,9], [2,4], [2,6], [3,4], [3,5]] - Space: \Theta(E)
- Search edge: O(E)
Adjacency matrix¶
Use a matrix[i][j] to represent the edges. 1 is connected, 0 is not connected.
-
Example:
[ [0, 1, 0, 0, 0, 0, 1, 0, 1, 0], [1, 0, 0, 0, 1, 0, 1, 0, 0, 1], [0, 0, 0, 0, 1, 0, 1, 0, 0, 0], [0, 0, 0, 0, 1, 1, 0, 0, 1, 0], [0, 1, 1, 1, 0, 1, 0, 0, 0, 1], [0, 0, 0, 1, 1, 0, 0, 0, 0, 0], [1, 1, 1, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 1, 1], [1, 0, 0, 1, 0, 0, 0, 1, 0, 0], [0, 1, 0, 0, 1, 0, 0, 1, 0, 0] ] -
Check edge
(i, j)exists: O(1) - Space: \Theta(V^2)
- Search djacent vertex: O(V)
- For undirected graph, adjacency matrix is symmetric. For a directed graph, the adjacency matrix need not be symmetric.
Adjacency list¶
Representing a graph with adjacency lists combines adjacency matrices with edge lists. For each vertex i, store an array of the vertices adjacent to it. Each vertex has a list.

- Space: \Theta(2E) for undirected graph. \Theta(E) for directed graph.
- Check edge
(i, j)exists: O(d),dis the degree of the vertexi. 0 \leq d \leq V - 1. - If the graph is weighted, then each item in each adjacency list is either a two-item array or an object, giving the vertex number and the edge weight.
Algorithms¶
- Weighted Graph
- Unweighted Graph
- Directed Graph
- Undirected Graph
- Graph Traversal
- Single Source Shortest Path
- Connected components
- Minimum spanning tree
Kosaraju's Two-pass algorithm¶
- Reverse each arc of the original graph.
- First run of the
DFS-Loopto computer the "finish" time of each node in the reversed graph. Book keeping:- The "source node of a node". A source node is the first node in the DFS tree.
- The "finish time of a node".
- Second run of the
DFS-Loopto computer the strongly connected components (SCC). The SCC is represented by the source node.
Dijkstra algorithm (No negative edge)¶
- Dijkstra algorithm implementation need one data structure (think of it as an array) to record the path distance, another data structure (priority queue) to maintain the min-heap which is ordered by the key of the edge weights. The algorithm greedily select the smallest edge from the queue and update the optimal solution so far (called relaxation in graph algorithm jargon).
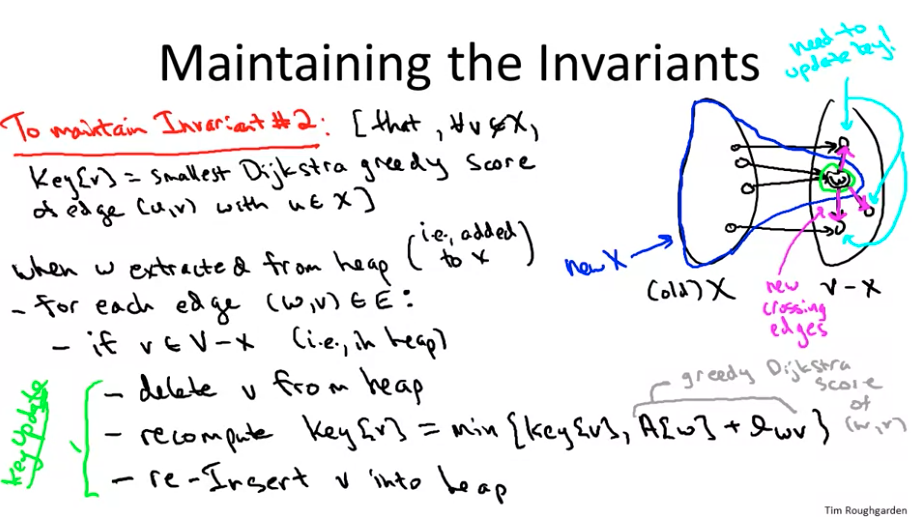
- Dijkstra algorithm Implemention requires to maintain two invariant, 1. All the vertices w_i that not in S will be kept in the heap. 2. The key should be the minimum weight of all the edges who's tail in S, head point to w_i. In every iteration, each w_i need to run a local turnament to decide its new key and then update the heap.
- To compare Dijkastra to BFS, when you visit a new node, Dijkastra will do a relaxation (update keys by local turnament and reinsert heap) while BFS simply add the node to the queue.
INITIALIZE-SINGLE-SOURCE(G, s)
for each vertex v in G.V:
v.d = inf
v.parent = null
s.d = 0
RELAX(u, v, w)
if v.d > u.d + w(u, v)
v.d = u.d + w(u, v)
v.parent = u
DIJKSTRA(G,w,s)
INITIALIZE-SINGLE-SOURCE(G, s)
S = None
Q = G.V
while Q != None
u = EXTRACT-MIN(Q)
S = S + {u}
for each vertex v in G.adj[u]:
RELAX(u, v, w)
Bellman-Ford¶
Bellman-Ford algorithm take care of negative edges in finding the single source shortest path in a graph. In addition, it also can be used to detect negative cycles reachable from the source. Notice Bellman-Ford algorithm can be optimized by exit when there is no new update happening. However, the worst case runtime is still O(V \cdot, E).
function BellmanFord(list vertices, list edges, vertex source) is
// This implementation takes in a graph, represented as
// lists of vertices (represented as integers [0..n-1]) and edges,
// and fills two arrays (distance and predecessor) holding
// the shortest path from the source to each vertex
distance := list of size n
predecessor := list of size n
// Step 1: initialize graph
for each vertex v in vertices do
distance[v] := inf // Initialize the distance to all vertices to infinity
predecessor[v] := null // And having a null predecessor
distance[source] := 0 // The distance from the source to itself is, of course, zero
// Step 2: relax edges repeatedly
repeat |V|−1 times:
for each edge (u, v) with weight w in edges do
if distance[u] + w < distance[v] then
distance[v] := distance[u] + w
predecessor[v] := u
// Step 3: check for negative-weight cycles
for each edge (u, v) with weight w in edges do
if distance[u] + w < distance[v] then
error "Graph contains a negative-weight cycle"
return distance, predecessor
Shortest Path Faster Algorithm¶
The algorithm is an improvement on Bellman-Ford algorithm. The idea is to limit the relaxation operation on only those nodes that have been relaxed before. We can use a queue to keep such nodes. However, the worst case runtime complexity is the same as Bellman-Ford, it is still O(V \cdot, E).
procedure Shortest-Path-Faster-Algorithm(G, s)
1 for each vertex v ≠ s in V(G)
2 d(v) := ∞
3 d(s) := 0
4 push s into Q
5 while Q is not empty do
6 u := poll Q
7 for each edge (u, v) in E(G) do
8 if d(u) + w(u, v) < d(v) then
9 d(v) := d(u) + w(u, v)
10 if v is not in Q then
11 push v into Q
Bipartise¶
- One algorithm to use in graph bipartition is using coloring, namely apply DFS and color each node with different colors when visited them differently.
Directed graph strongly connected components¶
Interivew Strategy¶
Clarification questions¶
- What's the input scale? What's the limit of depth?
- Does the graph have self-edge or duplications? what's the corresponding return value should be if yes?
Solving graph problems¶
- DFS/BFS/UF -> topological -> Bellman Ford -> Dijkastra ->
- To traverse a cyclic graph, we could not use visited, think of remove a edge after visited it. One example problem is 332. Reconstruct Itinerary
Problems¶
332. Reconstruct Itinerary¶
407. Trapping Rain Water II¶
class Solution {
public:
int trapRainWater(vector<vector<int>>& heightMap) {
if (heightMap.empty()) return 0;
int m = heightMap.size();
int n = m ? heightMap[0].size() : 0;
if (m <= 2 || n <= 2) {
return 0;
}
int res = 0, mx = 0;
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
vector<vector<bool>> visited(m, vector<bool>(n, false));
int x[4] = {-1, 0, 1, 0};
int y[4] = {0, 1, 0, -1};
// initialize the pq.
for (int i = 0; i < m; i++) {
for (int j = 0; j < n; j++) {
if (i == 0 || i == m - 1 || j == 0 || j == n - 1) {
pq.push({heightMap[i][j], i * n + j});
visited[i][j] = true;
}
}
}
while (!pq.empty()) {
auto t = pq.top(); pq.pop();
int h = t.first;
int i = t.second / n;
int j = t.second % n;
mx = max(h, mx);
for (int k = 0; k < 4; k++) {
int p = i + x[k];
int q = j + y[k];
if (p >= 0 && p < m && q >= 0 && q < n && !visited[p][q]) {
visited[p][q] = true;
if (heightMap[p][q] < mx) {
res += mx - heightMap[p][q];
}
pq.push({heightMap[p][q], p * n + q});
}
}
}
return res;
}
};
Critical Connections in a Network¶
Critical Routers¶
743. Network Delay Time¶
- Solution 1 Dijkstra algorithm
- What's the key for heap node?
- What's the data structure is needed? (
distarray, and a heap) - Solution 2 Bellman Ford algorithm
- Solution 3 Shortest Path Best algorithm
=== C++ Dijkstra
```c++
class Solution {
public:
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
vector<vector<pair<int, int>>> graph(n + 1, vector<pair<int, int>>());
for (auto& t: times) {
graph[t[0]].push_back({t[1], t[2]});
}
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
pq.push({0, k});
vector<int> dist(n + 1, INT_MAX);
dist[k] = 0;
while (!pq.empty()) {
pair<int, int> t = pq.top();
pq.pop();
int u = t.second;
for (auto x: graph[u]) {
int v = x.first;
int w = x.second;
if (dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
pq.push({dist[v], v});
}
}
}
int res = *max_element(dist.begin() + 1, dist.end());
return res == INT_MAX ? -1 : res;
}
};
```
=== C++ Bellman Ford
```c++
class Solution {
public:
int networkDelayTime(vector<vector<int>>& times, int n, int k) {
vector<int> dist(n + 1, INT_MAX);
dist[k] = 0;
for (int i = 0; i < n; ++i) {
for (auto& t : times) {
int u = t[0], v = t[1], w = t[2];
if (dist[u] != INT_MAX && dist[v] > dist[u] + w) {
dist[v] = dist[u] + w;
}
}
}
int res = *max_element(dist.begin() + 1, dist.end());
return res == INT_MAX ? -1 : res;
}
};
```
778. Swim in Rising Water¶
Solution 1 Binary search + DFS Solution 2 Dijkstra
class Solution {
int x[4] = {0, -1, 0, 1};
int y[4] = {-1, 0, 1, 0};
public:
int swimInWater(vector<vector<int>>& grid) {
int n = grid.size();
int begin = grid[0][0], end = n * n - 1;
// binary search find a path with mini elevation
while (begin < end) {
int mid = begin + (end - begin) / 2;
if (pathExist(grid, mid)) {
end = mid;
} else {
begin = mid + 1;
}
}
return begin;
}
bool pathExist(vector<vector<int>> & grid, int mid) {
int n = grid.size();
vector<vector<int>> visited(n, vector<int>(n, 0));
return dfs_helper(grid, visited, n, mid, 0, 0);
}
bool dfs_helper(vector<vector<int>> & grid, vector<vector<int>>& visited,
int n, int mid, int i, int j) {
visited[i][j] = 1;
for (int k = 0; k < 4; ++k) {
int a = i + x[k];
int b = j + y[k];
if (a < 0 || a >= n || b < 0 || b >= n || visited[a][b] == 1 || grid[a][b] > mid) continue;
if (a == n - 1 && b == n - 1) return true;
if (dfs_helper(grid, visited, n, mid, a, b)) return true;
}
return false;
}
};
class Solution {
int d[5] = {0, -1, 0, 1, 0};
public:
int swimInWater(vector<vector<int>>& grid) {
int n = grid.size();
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
pq.push({grid[0][0], 0});
vector<vector<int>> visited(n, vector<int>(n, 0));
visited[0][0] = 1;
int res = 0;
while (!pq.empty()) {
pair<int, int> t = pq.top();
pq.pop();
int x = t.second / n;
int y = t.second % n;
res = max(res, t.first);
if (x == n - 1 && y == n - 1)
break;
for (int i = 0; i < 4; ++i) {
int a = x + d[i];
int b = y + d[i + 1];
if (a >= 0 && a < n && b >= 0 && b < n && visited[a][b] == 0) {
visited[a][b] = 1;
pq.push({grid[a][b], a * n + b});
}
}
}
return res;
}
};
785. Is Graph Bipartite?¶
Solution 1 Coloring neighboring nodes with alternative color
class Solution {
public:
bool isBipartite(vector<vector<int>>& graph) {
int n = graph.size();
vector<int> visited(n, -1);
for (int i = 0; i < n; ++i) {
if (visited[i] == -1 && !dfs_helper(graph, visited, i, 1)) {
return false;
}
}
return true;
}
bool dfs_helper(vector<vector<int>>& graph, vector<int>& visited, int i, int color) {
if (visited[i] != -1) {
return visited[i] == color; // the color is ok
}
visited[i] = color; // not colored before, now color it
for (auto v : graph[i]) {
if (!dfs_helper(graph, visited, v, 1 - color)) {
return false;
}
}
return true;
}
};
1102. Path With Maximum Minimum Value¶
Solution 1 Dijkstra Solution 2 Union-Find
class Solution:
def maximumMinimumPath(self, A: List[List[int]]) -> int:
R, C = len(A), len(A[0])
parent = [i for i in range(R * C)]
dire = [(0, 1), (0, -1), (1, 0), (-1, 0)]
seen = [[0 for _ in range(C)] for _ in range(R)]
def find(x):
if parent[x] != x:
parent[x] = find(parent[x])
return parent[x]
def union(x, y):
rx, ry = find(x), find(y)
if rx != ry:
parent[ry] = rx
points = [(x, y) for x in range(R) for y in range(C)]
points.sort(key = lambda x: A[x[0]][x[1]], reverse = True)
for x, y in points:
seen[x][y] = 1
for dx, dy in dire:
nx, ny = x + dx, y + dy
if 0 <= nx < R and 0 <= ny < C and seen[nx][ny]:
union(x * C + y, nx * C + ny)
if find(0) == find(R * C - 1):
return A[x][y]
return -1
class Solution {
public:
int maximumMinimumPath(vector<vector<int>>& A) {
int m = A.size();
int n = A[0].size();
int res = INT_MAX;
priority_queue<pair<int, int>, vector<pair<int, int>>> pq; // max heap.
pq.emplace(A[0][0], 0);
vector<vector<int>> visited(m, vector<int>(n, 0));
visited[0][0] = -1;
int d[5] = {0, 1, 0, -1, 0};
while (!pq.empty()) {
pair<int, int> t = pq.top(); pq.pop();
int cost = t.first;
int x = t.second / n;
int y = t.second % n;
res = min(res, cost);
if (x == m - 1 && y == n - 1)
break;
for (int k = 0; k < 4; k++) {
int r = x + d[k];
int c = y + d[k + 1];
if (r < 0 || r >= m || c < 0 || c >= n || visited[r][c] < 0) continue;
pq.emplace(A[r][c], r * n + c);
visited[r][c] = -1;
}
}
return res;
}
};
1514. Path with Maximum Probability¶
class Solution {
public:
double maxProbability(int n, vector<vector<int>>& edges,
vector<double>& succProb, int start, int end) {
unordered_map<int, vector<pair<int, double>>> graph;
for (int i = 0; i < edges.size(); ++i) {
graph[edges[i][0]].push_back({edges[i][1], succProb[i]});
graph[edges[i][1]].push_back({edges[i][0], succProb[i]});
}
vector<double> prob(n, 0.0);
prob[start] = 1.0;
priority_queue<pair<double, int>> pq;
pq.push({1.0, start});
while (!pq.empty()) {
pair<double, int> u = pq.top(); pq.pop();
for (auto vp: graph[u.second]) {
int v = vp.first;
double p = vp.second;
if (prob[v] < p * prob[u.second]) {
prob[v] = p * prob[u.second];
pq.push({prob[v], v});
}
}
}
return prob[end];
}
};
1631. Path With Minimum Effort¶
class Solution {
public:
int minimumEffortPath(vector<vector<int>>& heights) {
int m = heights.size();
int n = heights[0].size();
vector<vector<int>> dist(m, vector<int>(n, INT_MAX)); // min distance found so far.
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
int d[5] = {0, 1, 0, -1, 0};
pq.emplace(0, 0); // first: min effort, second: encoded (x, y) (=x * n + y);
while (!pq.empty()) {
pair<int, int> t = pq.top();
int effort = t.first;
int x = t.second / n;
int y = t.second % n;
pq.pop();
if (x == m - 1 && y == n - 1)
return effort;
for (int k = 0; k < 4; ++k) {
int a = x + d[k];
int b = y + d[k + 1];
if (a < 0 || a >= m || b < 0 || b >= n) continue;
int currEffort = max(effort, abs(heights[a][b] - heights[x][y]));
if (currEffort < dist[a][b]) {
dist[a][b] = currEffort;
pq.push({currEffort, a * n + b});
}
}
}
return -1;
}
};
class Solution:
def minimumEffortPath(self, heights: List[List[int]]) -> int:
m, n = map(len, [heights, heights[0]])
efforts = [[math.inf] * n for _ in range(m)]
efforts[0][0] = 0
heap = [(0, 0, 0)]
while heap:
effort, x, y = heapq.heappop(heap);
if x == m - 1 and y == n - 1:
return effort
for i, j in (x, y - 1), (x, y + 1), (x - 1, y), (x + 1, y):
if i < 0 or i >= m or j < 0 or j >= n:
continue
currEffort = max(effort, abs(heights[x][y] - heights[i][j]))
if efforts[i][j] > currEffort:
efforts[i][j] = currEffort
heapq.heappush(heap, (currEffort, i, j))
class Solution {
private int[] d = {0, 1, 0, -1, 0};
public int minimumEffortPath(int[][] heights) {
int lo = 0, hi = 1_000_000;
while (lo < hi) {
int effort = lo + (hi - lo) / 2;
if (isPath(heights, effort)) {
hi = effort;
}else {
lo = effort + 1;
}
}
return lo;
}
private boolean isPath(int[][] h, int effort) {
int m = h.length, n = h[0].length;
Queue<int[]> q = new LinkedList<>();
q.offer(new int[2]);
Set<Integer> seen = new HashSet<>();
seen.add(0);
while (!q.isEmpty()) {
int[] cur = q.poll();
int x = cur[0], y = cur[1];
if (x == m - 1 && y == n - 1) {
return true;
}
for (int k = 0; k < 4; ++k) {
int r = x + d[k], c = y + d[k + 1];
if (0 <= r && r < m && 0 <= c && c < n &&
effort >= Math.abs(h[r][c] - h[x][y]) && seen.add(r * n + c)) {
q.offer(new int[]{r, c});
}
}
}
return false;
}
}
class Solution {
private int[] d = {0, 1, 0, -1, 0};
public int minimumEffortPath(int[][] heights) {
int lo = 0, hi = 1_000_000;
while (lo < hi) {
int mid = lo + (hi - lo) / 2;
if (isPath(heights, mid)) {
hi = mid;
} else {
lo = mid + 1;
}
}
return lo;
}
private boolean isPath(int[][] h, int mid) {
int m = h.length, n = h[0].length;
Queue<int[]> q = new LinkedList<>();
q.offer(new int[2]);
Set<Integer> seen = new HashSet<>();
seen.add(0);
while (!q.isEmpty()) {
int[] cur = q.poll();
int x = cur[0], y = cur[1];
if (x == m - 1 && y == n - 1)
return true;
for (int k = 0; k < 4; k++) {
int r = x + d[k], c = y + d[k + 1];
if (0 <= r && r < m && 0 <= c && c < n &&
mid >= Math.abs(h[r][c] - h[x][y]) && seen.add(r * n + c)) {
q.offer(new int[]{r, c});
}
}
}
return false;
}
}